Custom functions for automated analysis, including linearization and simulation, and their comparison
This package contains two functions for automated analysis:
Extends from Modelica.Icons.FunctionsPackage (Icon for packages containing functions).
| Name | Description |
|---|---|
| Linearize the model at any point in time tlin | |
| Linearize the model, simulate the linear model obtained and compare with the nonlinear model response. |
Linearize the model at any point in time tlin
This function linearizes the non-linear model at any point in time specified by the user.
The results are displayed in the Commands Window.
The obtained linear model can be used in any other environment. The linear model is available in the file, dslin.mat, that will appear under your Dymola working directory. It can be loaded in MATLAB using the Dymola function:
[A,B,C,D,xName,uName,yName] = tloadlin('dslin.mat')
Add to the MATLAB workspace the directory and sub-directories under: C:\Program Files\Dymola 2024x\Mfiles
In addition, the file MyData.mat contains the y0 vector, which corresponds to the output vector at the point in time where linearization is performed.
Usage
.png)
Sample Output
Executing the function gives the following results in the "Commands" window.
Example1.Analysis.LinearAnalysis.CustomFunctions.LinearizeSimple();
DAE Mode is turned off.
Global optimization is disabled.
Sparse options disabled.
Linearization and Nonlinear Model Comparison is starting...
Linearized Model
Number of states: 12
Simulating nonlinear model
= true
Redeclaring variable: Real y0 [7, 1012];
= true
Declaring variable: Real y0out [7];
y0 =
= "
y0 = =
1.000024318695068359375
0.196186602115631103515625
0.900009691715240478515625
1
1.28431034088134765625
2.50904435006304993294179e-07
2.120034694671630859375
"
=
[0.0, 376.9911183891212, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
-0.17610876763748942, 0.0, 0.0, 0.0, -0.19586150145880193, 0.05515410219837237,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
-0.25587785362300375, 0.0, -0.12499999997574654, 0.0, -0.2667630481888344,
-0.001159492170868593, 0.0, 0.0, 0.12499999999488744, 0.0, 0.0, 0.0;
0.4265899899207167, 0.0, 0.0, -1.0000000000939857, 0.007883244407403102,
-1.4901043751184482, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
-3.3690289136967633, 0.0, 33.3333333351218, 0.0, -36.84568272027127,
-0.015266513308270566, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
2.4254614215865864, 0.0, 0.0, 14.285714287056937, 0.04482173884230768,
-22.75799624545071, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
-8.934890956417721, 0.0, 0.0, 0.0, 29.303251383490004, 33.12307890942945,
-66.66666667217629, 0.0, 0.0, 0.0, 0.0, 0.0;
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -1.0, 0.0, 0.0, 0.0, 0.0;
0.0, 18999999.999786172, 0.0, 0.0, 0.0, 0.0, -2000000.0001652886,
10000.00082740371, -9999.999999590995, 0.0, 0.0, -18999999.99980534;
0.0, 0.009499999999893087, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -0.001, 0.0,
-0.009499999999902671;
0.0, 0.009499999999893087, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -0.001,
-0.009499999999902671;
0.0, 0.7092198580776662, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
-0.7092198581570424],
[0.0, 0.0, 0.0, 0.0;
0.0, 0.14285715467719584, -0.03160725649463204, 0.0;
0.0, 0.0, -0.04042882695287631, 0.0;
0.0, 0.0, 0.10093337277083947, 0.0;
0.0, 0.0, -0.532308225276168, 0.0;
0.0, 0.0, 0.5738762639698587, 0.0;
0.0, 0.0, -1.0247506547026812, 0.0;
0.0, 0.0, 0.0, 0.0;
19000001.57206705, 0.0, 0.0, 2000000.1654807418;
0.009500000786033523, 0.0, 0.0, 0.0;
0.009500000786033523, 0.0, 0.0, 0.0;
0.7092199168371426, 0.0, 0.0, 0.0],
[-0.13402336434626583, 0.0, 0.0, 0.0, 0.43954877075235005, 0.4968461836414418,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
0.3043068141629995, 0.0, 0.0, 0.0, 1.4537261850177308, 0.7665888604391177, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0;
1.2253264601006595, 0.0, 0.0, 0.0, 1.3643245623264468, -0.38254244268485077, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0;
0.0, 0.9999999998895094, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
1.0000000001010991, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
0.0, 9.499999999893086, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
-9.49999999990267;
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.9999999999590995, 0.0, 0.0, 0.0],
[0.0, 0.0, -0.015371259820540216, 0.0;
0.0, 0.0, 0.02120334463562301, 0.0;
0.0, 0.0, 0.21999579935538804, 0.0;
0.0, 0.0, 0.0, 0.0;
0.0, 0.0, 0.0, 0.0;
9.500000786033524, 0.0, 0.0, 1.0;
0.0, 0.0, 0.0, 0.0], {"uPSS", "uPm", "uPload", "uvsAVR"}, {"Vt", "Q", "P", "w",
"delta", "AVRin", "AVRout"}, {"Plant.G1.machine.delta", "Plant.G1.machine.w",
"Plant.G1.machine.e1q", "Plant.G1.machine.e1d", "Plant.G1.machine.e2q",
"Plant.G1.machine.e2d", "Plant.G1.avr.vm", "Plant.G1.avr.vr", "Plant.G1.avr.vf1",
"Plant.G1.pss.imLeadLag.TF.x_scaled[1]", "Plant.G1.pss.imLeadLag1.TF.x_scaled[1]",
"Plant.G1.pss.derivativeLag.TF.x_scaled[1]"}
| Name | Description |
|---|---|
| tlin | t for model linearization [s] |
| tsim | Simulation time [s] |
| pathToNonlinearPlantModel | Nonlinear model for linearization |
| pathToNonlinearExperiment | Nonlinear Model for simulation |
| Name | Description |
|---|---|
| A[:, :] | A-matrix |
| B[:, :] | B-matrix |
| C[:, :] | C-matrix |
| D[:, :] | D-matrix |
| inputNames[:] | Modelica names of inputs |
| outputNames[:] | Modelica names of outputs |
| stateNames[:] | Modelica names of states |
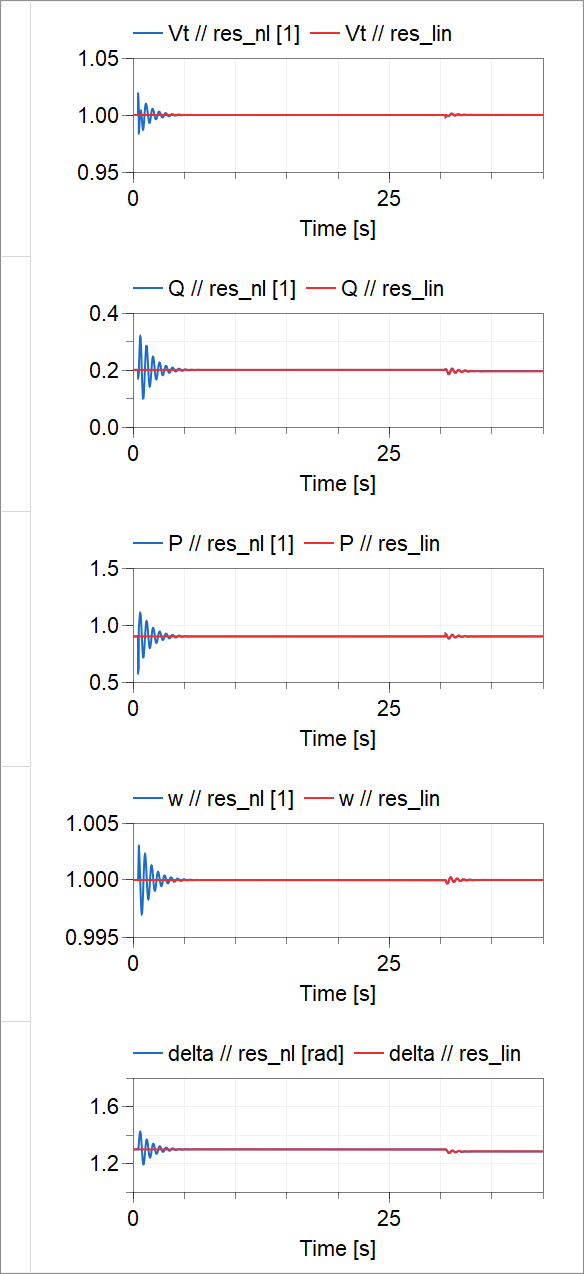
Linearize the model, simulate the linear model obtained and compare with the nonlinear model response.
This function can linearize the model at initialization or at a user provided point in time. Once the model is linearized, linear model and the nonlinear models are simulated.
The response of both models is then plotted/compared to check the quality of the linear model.
The function uses the following models:
After executing the function the results are displayed in the command window.
For post-processing, the follwing .mat files are generated with time simulation responses are produced:
The linearized model is contained in the following .mat files:
Usage
.png)
Sample Output
Executing the function gives the following plot is produced in the "Simulation" window and the following results in the "Commands" window.
Example1.Analysis.LinearAnalysis.CustomFunctions.LinearizeAndCompare();
DAE Mode is turned off.
Global optimization is disabled.
Sparse options disabled.
Linearization and Nonlinear Model Comparison is starting...
= true
= true
Simulating nonlinear model
= true
= true
= true
y0 before disturbance =
= "
0.998271
0.203063
0.921617
1
1.29897
-3.55698e-11
2.12495
"
Simulating linear model
= true
= true
= 1
= 1
= 1
= 1
= 1
= 1
= 1
= 1
= 1
= 1
=
[0.0, 376.99111838906373, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
-0.17610876767279915, 0.0, 0.0, 0.0, -0.19586150142483613, 0.05515410219997556,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
-0.25587785359503384, 0.0, -0.12500000002903436, 0.0, -0.2667630481021101,
-0.001159492170902296, 0.0, 0.0, 0.12500000001466172, 0.0, 0.0, 0.0;
0.42658999050935953, 0.0, 0.0, -0.9999999998908723, 0.007883244274318683,
-1.4901043751617613, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
-3.369028913176898, 0.0, 33.33333333281978, 0.0, -36.84568271688989,
-0.015266512953637873, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
2.425461424825778, 0.0, 0.0, 14.285714284155317, 0.0448217383657263,
-22.75799624611222, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
-8.934890939628422, 0.0, 0.0, 0.0, 29.303251372407868, 33.1230788990298,
-66.66666667021094, 0.0, 0.0, 0.0, 0.0, 0.0;
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -1.0, 0.0, 0.0, 0.0, 0.0;
0.0, 18999999.999783278, 0.0, 0.0, 0.0, 0.0, -2000000.0001063284,
10000.00082740371, -10000.000001172937, 0.0, 0.0, -18999999.996308953;
0.0, 0.00949999999989164, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -0.001, 0.0,
-0.009499999998154478;
0.0, 0.00949999999989164, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -0.001,
-0.009499999998154478;
0.0, 0.7092198580775582, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
-0.7092198580803518],
[0.0, 0.0, 0.0, 0.0;
0.0, 0.14285715467719584, -0.03160719305331635, 0.0;
0.0, 0.0, -0.040428715930573844, 0.0;
0.0, 0.0, 0.10093331725968824, 0.0;
0.0, 0.0, -0.5323070687938507, 0.0;
0.0, 0.0, 0.5738766604780818, 0.0;
0.0, 0.0, -1.024765457676343, 0.0;
0.0, 0.0, 0.0, 0.0;
19000001.57206705, 0.0, 0.0, 2000000.1654807418;
0.009500000786033523, 0.0, 0.0, 0.0;
0.009500000786033523, 0.0, 0.0, 0.0;
0.7092199168371426, 0.0, 0.0, 0.0],
[-0.1340233640944263, 0.0, 0.0, 0.0, 0.43954877058611797, 0.496846183485447, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0;
0.3043068137697762, 0.0, 0.0, 0.0, 1.4537261847736198, 0.7665888603335728, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0;
1.2253264605206322, 0.0, 0.0, 0.0, 1.364324561691764, -0.38254244286640693, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0;
0.0, 0.9999999998893571, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
1.0000000001610603, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0;
0.0, 9.499999999891639, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
-9.499999998154477;
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0000000001172937, 0.0, 0.0, 0.0],
[0.0, 0.0, -0.01537148186514514, 0.0;
0.0, 0.0, 0.02120284503526193, 0.0;
0.0, 0.0, 0.21999546628848066, 0.0;
0.0, 0.0, 0.0, 0.0;
0.0, 0.0, 0.0, 0.0;
9.500000786033524, 0.0, 0.0, 1.0;
0.0, 0.0, 0.0, 0.0], {"uPSS", "uPm", "uPload", "uvsAVR"}, {"Vt", "Q", "P", "w",
"delta", "AVRin", "AVRout"}, {"Plant.G1.machine.delta", "Plant.G1.machine.w",
"Plant.G1.machine.e1q", "Plant.G1.machine.e1d", "Plant.G1.machine.e2q",
"Plant.G1.machine.e2d", "Plant.G1.avr.vm", "Plant.G1.avr.vr", "Plant.G1.avr.vf1",
"Plant.G1.pss.imLeadLag.TF.x_scaled[1]", "Plant.G1.pss.imLeadLag1.TF.x_scaled[1]",
"Plant.G1.pss.derivativeLag.TF.x_scaled[1]"}, {0.9982708096504211,
0.20306333899497986, 0.9216165542602539, 1.0, 1.2989709377288818,
-3.5569769352150615E-11, 2.124945878982544}
| Name | Description |
|---|---|
| tlin | t for model linearization [s] |
| tsim | Simulation time [s] |
| numberOfIntervalsin | No. of intervals |
| methodin | Solver |
| fixedstepsizein | Time step - needed only for fixed time step solvers |
| pathToNonlinearPlantModel | Nonlinear plant model |
| pathToNonlinearExperiment | Nonlinear experiment model |
| pathToLinearExperiment | Linear model for simulation |
| Name | Description |
|---|---|
| A[:, :] | A-matrix |
| B[:, :] | B-matrix |
| C[:, :] | C-matrix |
| D[:, :] | D-matrix |
| inputNames[:] | Modelica names of inputs |
| outputNames[:] | Modelica names of outputs |
| stateNames[:] | Modelica names of states |
| y0out[:] | Initial value of the output variables |